Posted: November 28, 2013
Contributing Authors: Dick James

Xbox One Kinect
As we said in our Xbox One article, the new Kinect is quite a complex piece of equipment, so we thought that we'd dedicate a whole article to it.
The first major difference we noticed for the new Kinect is that it's connected by a fairly hefty cable - no WiFi anymore. The unit is basically made up of two parts, the microphone bar at the front of the stand, and the optical assembly sitting on a tiltable mount above.



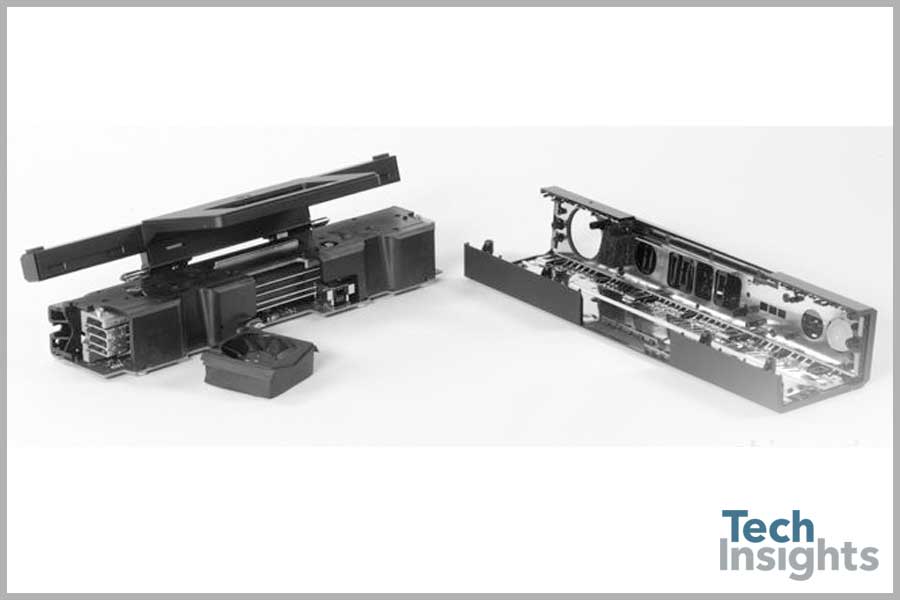
Inside the Xbox One Kinect
Let's have a look inside
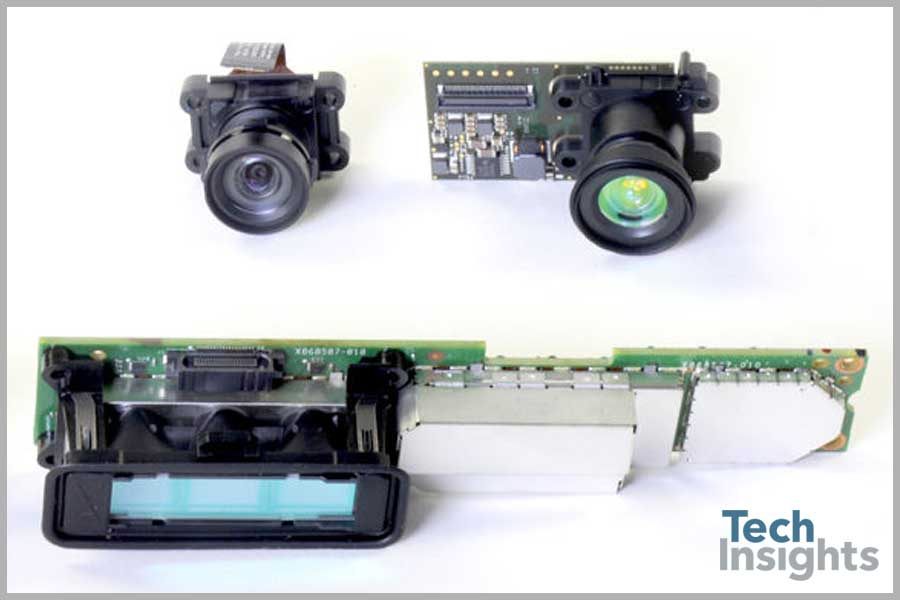
When we get inside, we can see that there is a fan and what looks like a sizable heat sink, so this thing obviously gets quite hot; and two cameras, not just the one visible with the case on. It is also apparent that the front panel is tinted but transparent, since there are windows in the metal frame inside. The tentative conclusion here is that the camera with the clear window is colour, and the other is infra-red (IR).


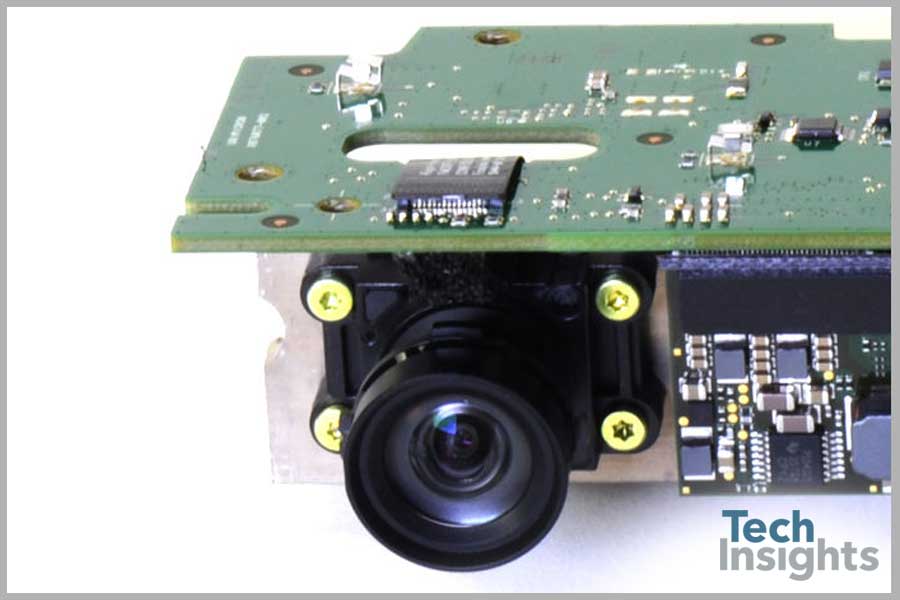

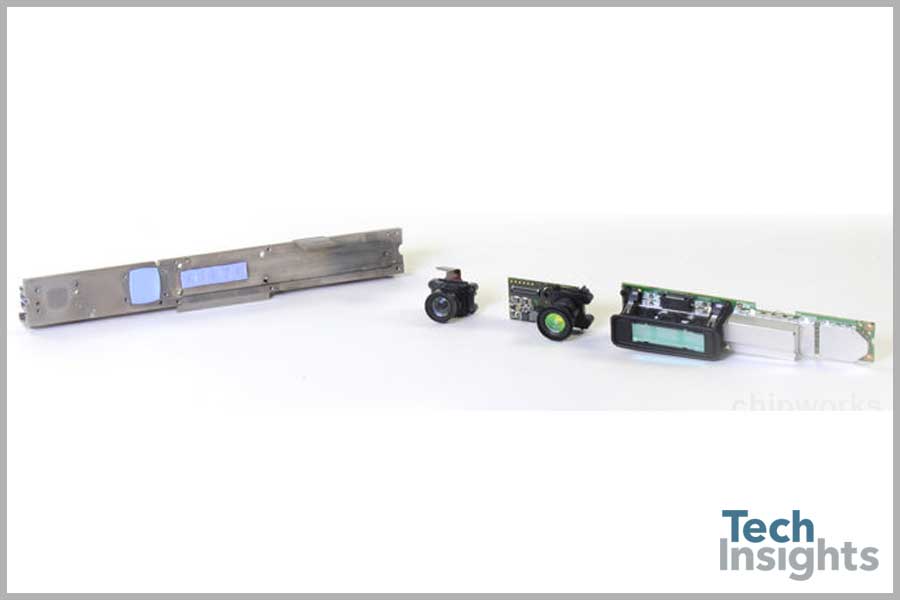
Xbox One Kinect Components
Taking the components off the board
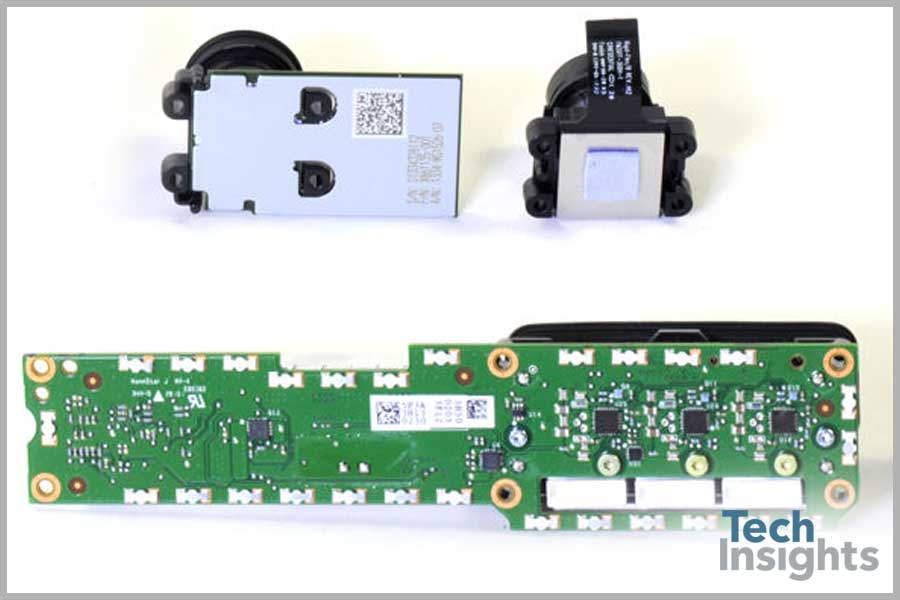
When we take the components off the front board, there are thermal pads behind both cameras and the left side of the larger PC board. The left (colour) camera is connected to the top PC board, whereas the IR camera has its own board.
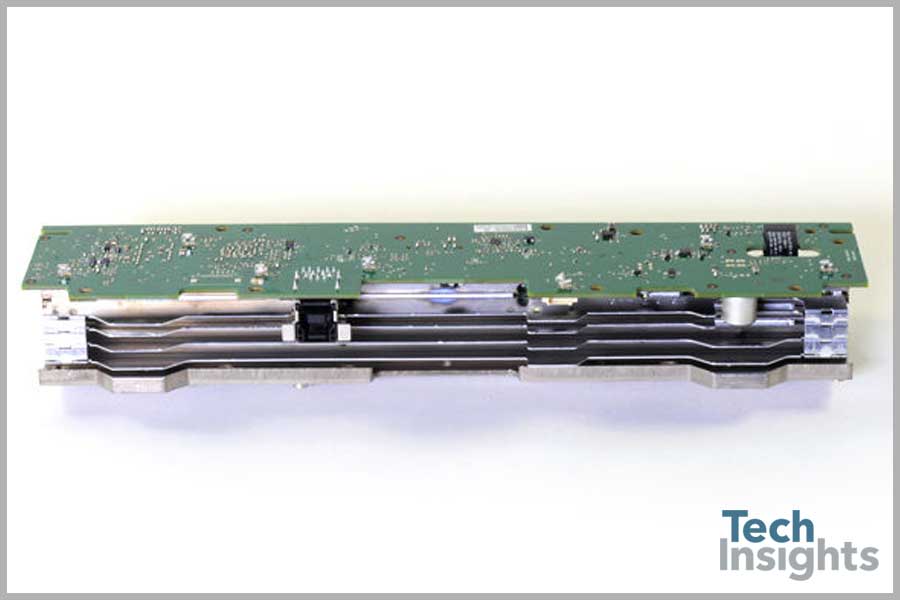
Circuit Board
The circuit board
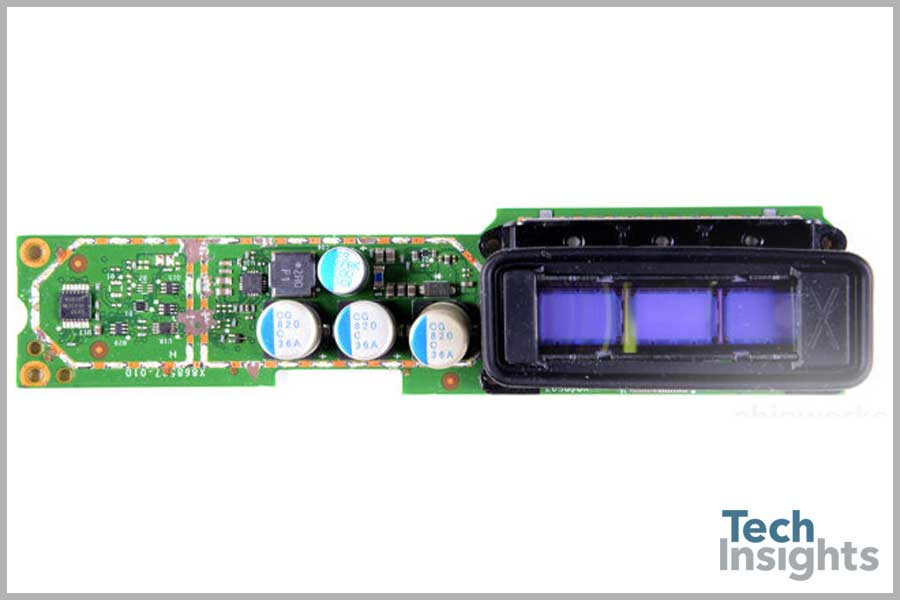
As we dissect the larger front board, there is clearly a power supply block in the centre, with a TI TPS 54622 Synchronous Step-Down SWIFT™ Converter included, and a TI LMV339 low-voltage comparator chip over on the left. On the right we have what could be another array of cameras, but when we take the moulding off the board it appears to be an array of filters over three LEDs. Judging by the aluminum blocks that they are mounted in, they are the primary source of heat in the Kinect.
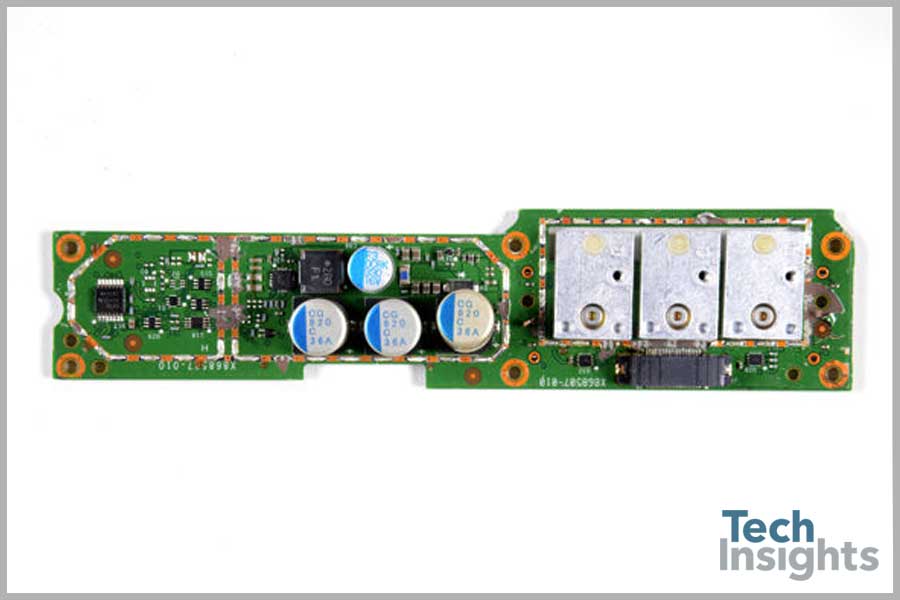
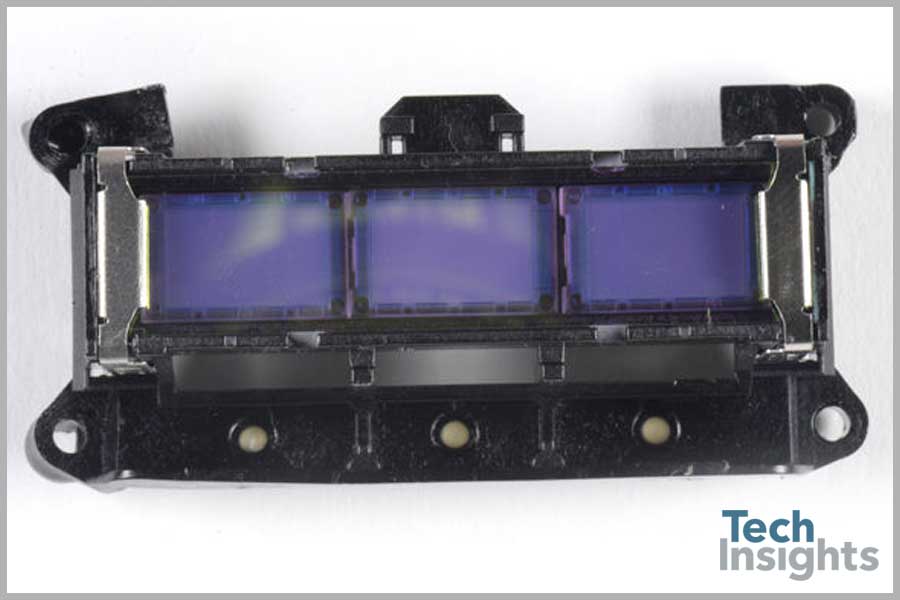


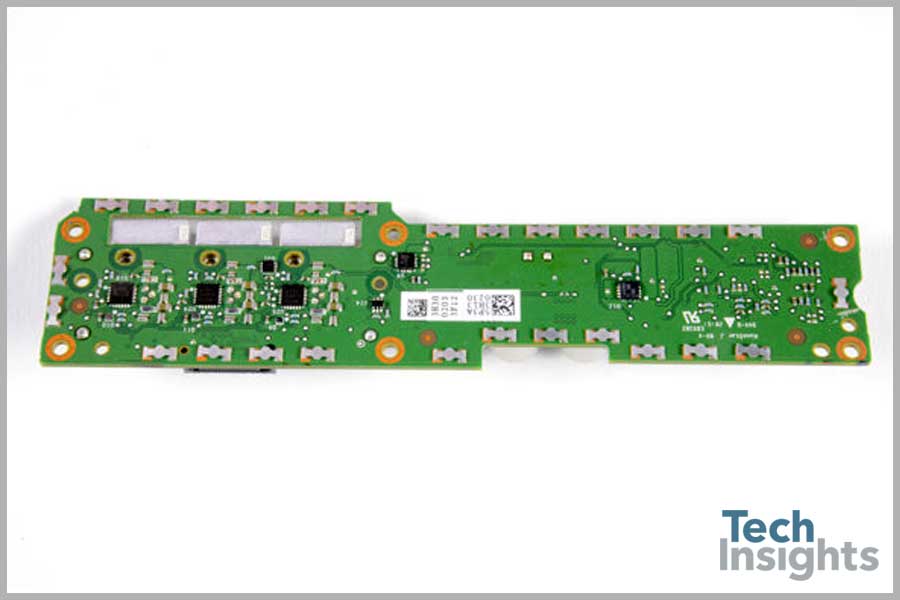
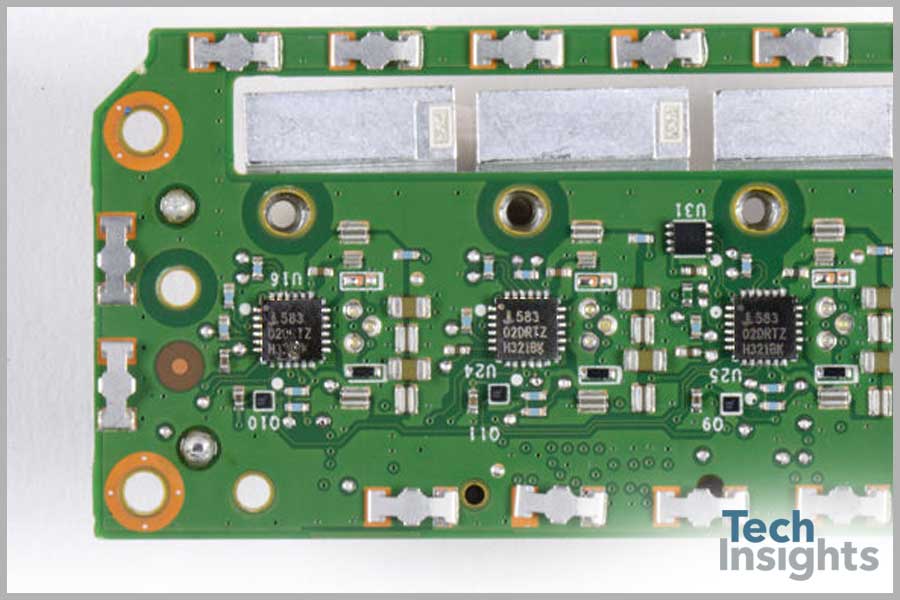
On the back of the board we have three Intersil ISL58302 parts, which appear to be laser diode drivers (we can find the ISL58303, but not the ISL58302), so maybe the 'LEDs' are IR laser diodes, not LEDs. Behind the power supply is a TI CICLON CSD25401 NexFET™ Power MOSFET. There's also a NB3L 14S which we haven't been able to identify.
All of which confirms that the Kinect has active IR illumination as well as the IR camera as part of its 3-D imaging and ranging capability.
Device Wins
Device Wins
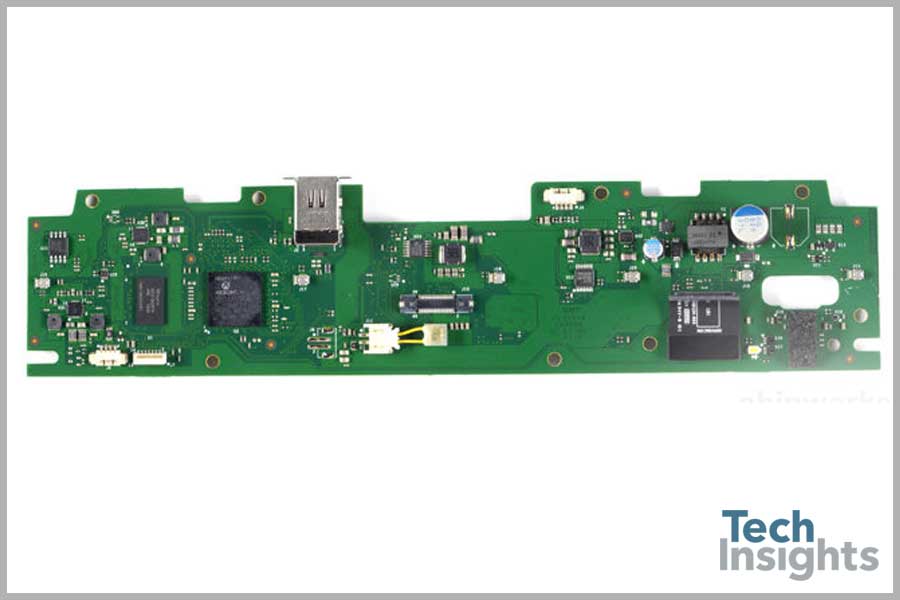
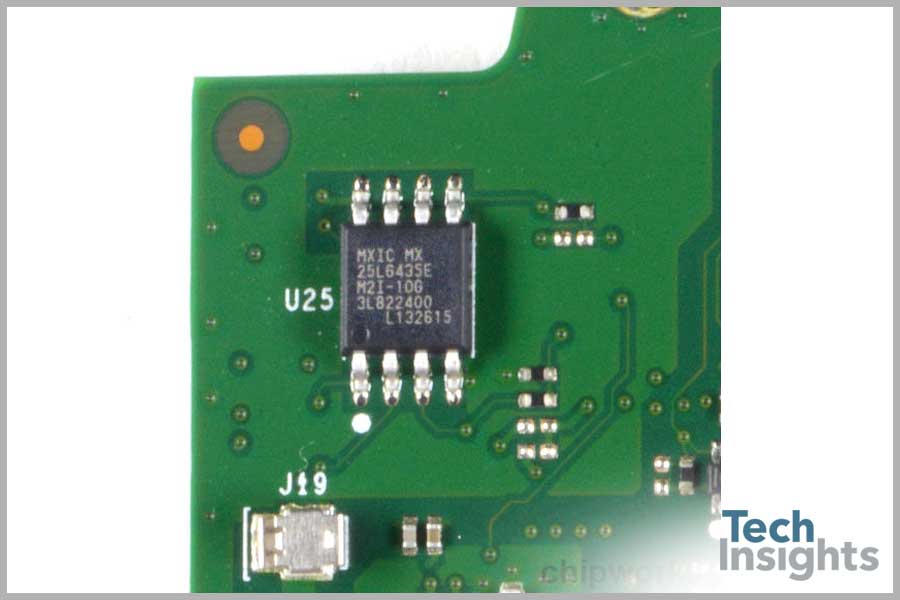
The top board is not highly populated, but it does have some interesting parts. Starting on the left is a Macronix MX25L25635F 256 MB serial flash, then a SK hynix H5TC1G63EFR 1 Gb (128 MB) DDR3L SDRAM, with a pair of ON Semi NCP6922C power management ICs adjacent to them. Then we have the Microsoft X871141-001 SoC which replaces the Prime Sense chip used in the first Kinect. By the look of the font and package codes it's from STMicroelectronics. Over on the right we have more power supply circuitry with a pair of TI synchronous buck converters (TPS54325 & TPS54225) and an ON Semi NCL30161 constant-current buck regulator.
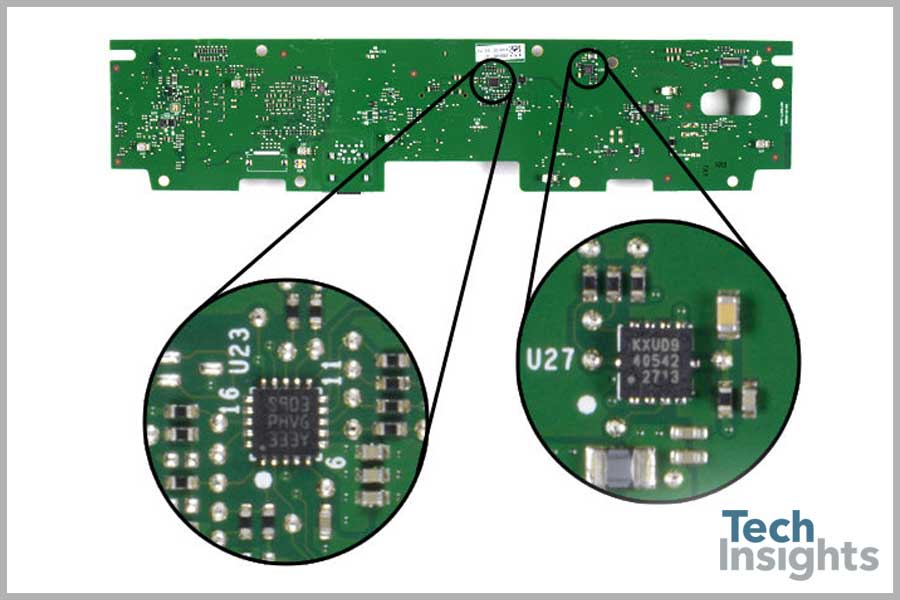
The reverse of the board is almost bare of chips, but there is a Kionix KXUD9 tri-axis accelerometer and what looks like another STMicroelectronics or Bosch Sensortec MEMS device (S903 PHVG 333Y). Seeing as the Kinect is not a controller to be waved around, that seems a bit odd, but maybe they are there for image stabilization of the cameras when folks are jumping around on a bouncy wooden floor.


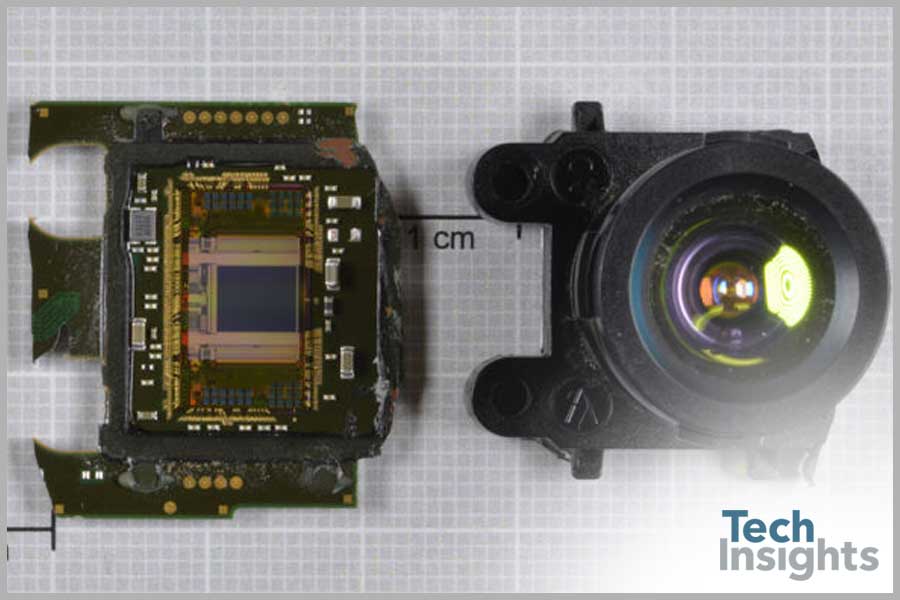
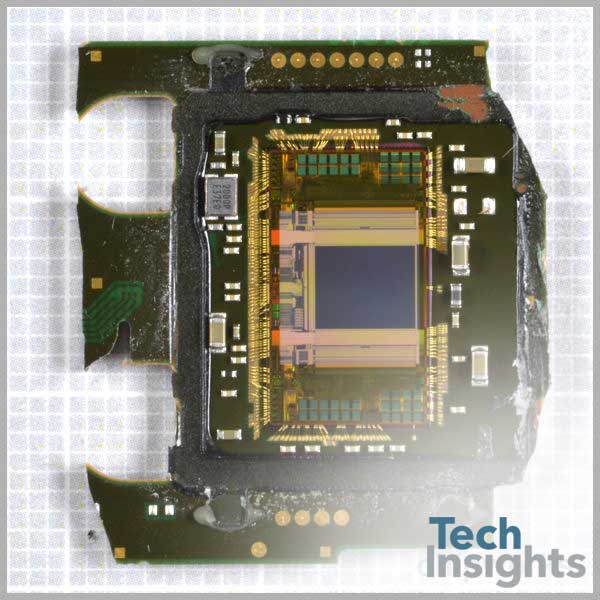
Infra-red Camera
The infra-red camera
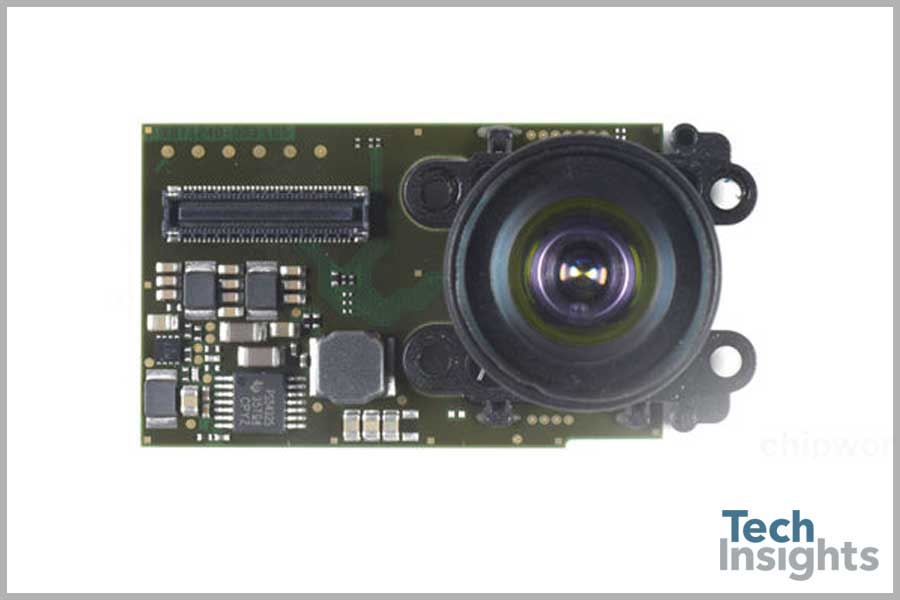
We're almost done, but there's still the infra-red camera board, and there's also a small board in the base for the microphones.
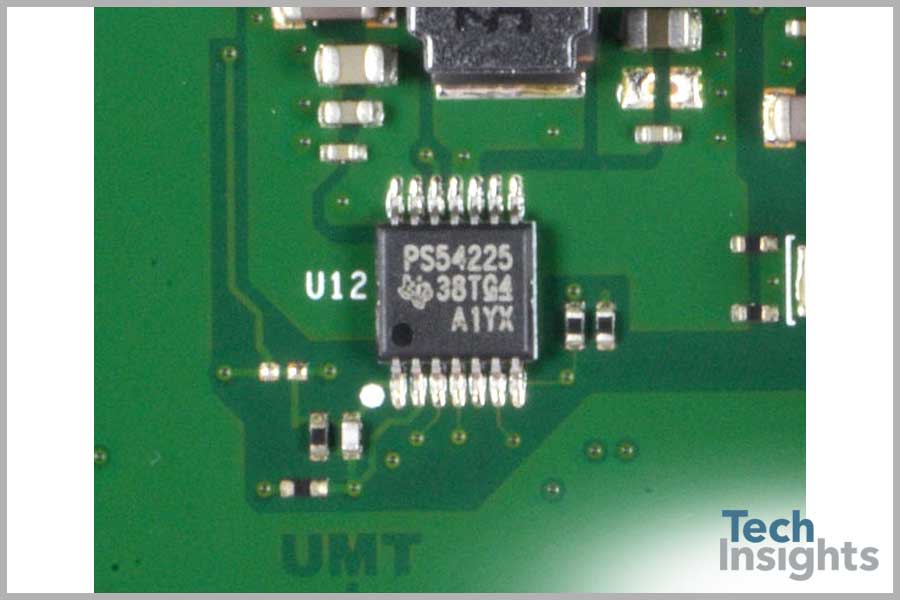
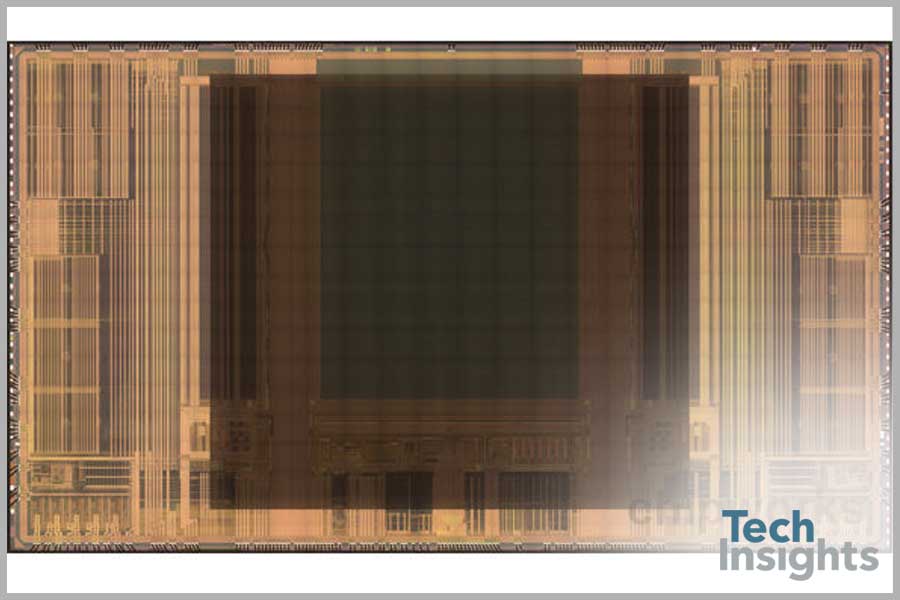
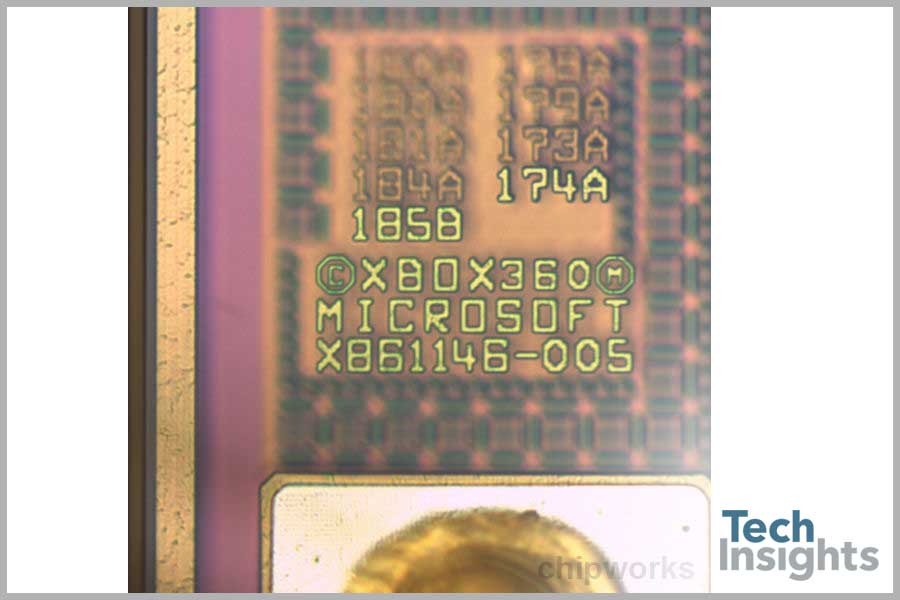
The camera board is straightforward, with just a power management block, including yet another TPS54325, and the camera. The board may be straightforward, but the camera is definitely different - now we have the die photo, and it's pretty complex compared with the standard fare that we get out of a DSC or phone. The pixel array is in the centre, but there's some sizable blocks of circuitry on either side that obviously do some of the signal processing. And the die mark is a surprise - was this intended for an an Xbox 360 Kinect upgrade?
Microphones
The microphones
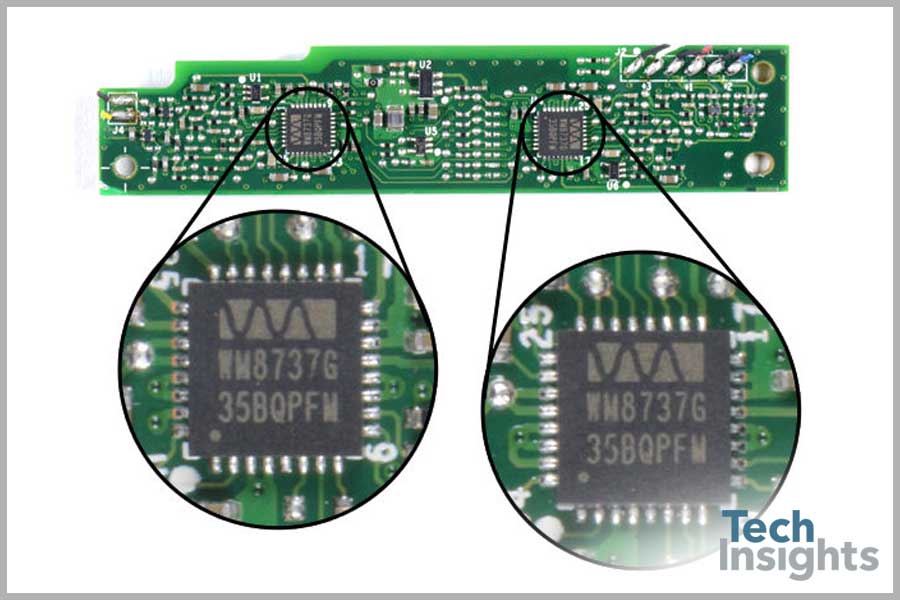
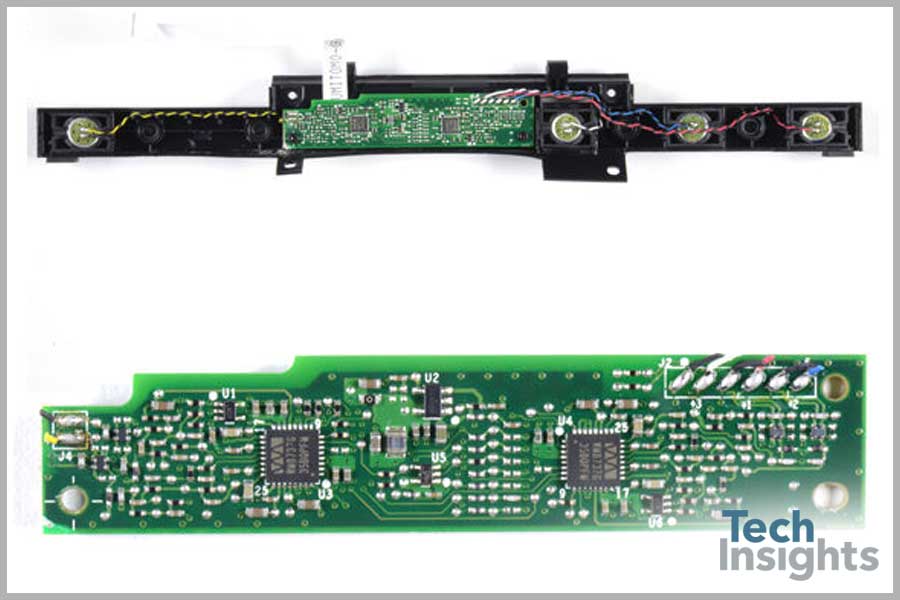
Looking at the microphone bar, it has no less than four microphones, in a three + one configuration, and on the board we have two Wolfson WM8737 Stereo ADCs. Presumably there's some intensive sound cancellation processing going on with that many microphones. Wolfson had a win in the first Kinect with the same part, but only one was used - now they've doubled up!

Improved Performance
Improved Performance
Now that we've seen what's inside the Kinect, we know what's behind its improved performance. First, we have wide-angle 1080p colour and IR cameras, both coupled into the Southbridge chip in the main console.
The key to the 3D depth resolution seems to be the active illumination; the IR camera is equipped with a timing generator, which turns the laser diodes on and off at high frequency and tells the camera whether the light is on or off. By doing some computational comparisons on the two signals, three images can be generated - a normal greyscale image, a depth image, and another grey scale image that is independent of ambient lighting. (Charlie Demerjian of SemiAccurate gives a more detailed description of the method here and here; the full details were given in a paper at the Hot Chips conference back in August, and will be up on their site in January).
There seems to be something else going on though, since we have three laser diodes, and the filters over them are patterned with what looks like a grid; maybe the diodes are toggled in sequence, and a grid is projected, to help in the motion detection part of the system.
Microsoft has posted a video that demonstrates the different images that are seen by the Kinect.
And while we're at it, there's also a demo of the depth of the human modelling built into the system.

So all-in-all, we have quite an impressive array of technology built into the Kinect. Pity we had to tear it down!




